![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Transportation robot (TR)
Introduction
The aim of this project, which is carried out in
cooperation with several Japanese universities (see below) is to build a
general-purpose robot for reliable (indoor) transportation and delivery of
goods. An important aim with the project is also to test the
utility
function (UF) method in a complex, real-world task.
Completed project milestones
| Item | Status |
| Detailed project formulation | Completed March 2005 |
| Improvements of the UF method | Completed June 2006 |
| System identification of hardware components | Completed June 2006 |
| Simulation software | Completed June 2006 |
| Simulations for the basic transportation robot (3 behaviors) | Completed June 2006 |
| Project meeting at Waseda University, Tokyo | Took place in June 2006 |
| Construction of first prototype | Completed August 2006 |
Upcoming project milestones
| Item | Status |
| Simulations for the complete transportation robot (7+ behaviors) | September 2006 - January 2007 |
| Construction of the second prototype (full-scale), Sweden | January 2007 - April 2007 |
| Construction of the second prototype (full-scale), Japan | January 2007 - April 2007 |
TBA
Project participants:
| Dr. Pitoyo Hartono | Future University, Hakodate, Japan |
| Prof. Shuji Hashimoto | Waseda University, Tokyo, Japan |
| Mr. Jimmy Pettersson | Chalmers University of Technology, Göteborg, Sweden |
| Dr. Ryo Saegusa | Waseda University, Tokyo, Japan |
| Dr. Kenji Suzuki | Tsukuba University, Tsukuba, Japan |
| Dr. Mattias Wahde (Project leader) | Chalmers University of Technology, Göteborg, Sweden |
| Mr. Krister Wolff | Chalmers University of Technology, Göteborg, Sweden |
Simulations for the basic transportation robot
(More information to be added)
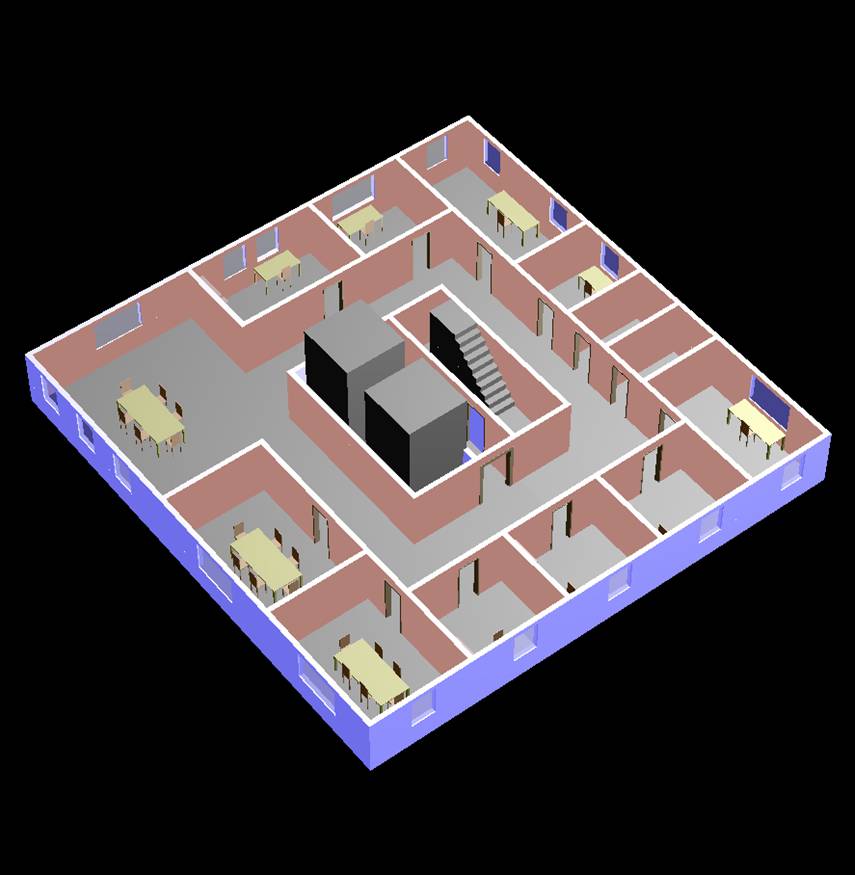
Typical arena for the simulations.

The transportation robot in action.
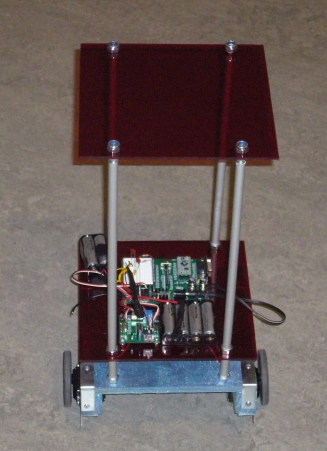
Construction of first prototype
(More information to be added)

Publications
Wahde, M. and Pettersson, J. A General-Purpose Transportation Robot - An Outline of Work in Progress, In: Proceedings of the 15th IEEE International Symposium on Robot and Human Interactive Communication (Ro-Man2006), pp. 722-726, 2006
Pettersson, J. and Wahde, M. Behavior selection for localization and navigation in
a transportation robot, Manuscript in preparation
Acknowledgement
We are grateful to the Carl Trygger Foundation (Carl Tryggers stiftelse) for partial financial support for this project.
This page is under construction. Last update 20060914, 07.10